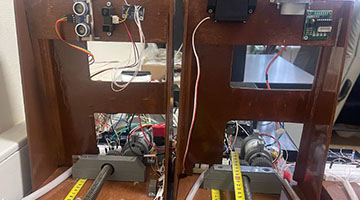
В лаборатории Интеллектуальной роботроники МИНОТ под руководством д.т.н. Пряничникова В.Е. проведено исследование возможности использования различных библиотек для эффективного управления сервомоторами движителей робототехнических устройств с регулировкой скорости и плавности. В качестве объекта управления было создана трехстепенная платформа, способная с достаточно высокой скоростью разворачивать размещаемую на ней полезную нагрузку,. Разработанный соответствующий скетч для Arduino позволил провести
эксперименты и подтвердить работоспособность системы.
Эта система может стать удачным стендом для обучения студентов и школьников, в том числе при работе с различными сенсорными устройствами или в качестве небольшого манипулятора.
В современных системах управления робототехническими устройствами различного назначения, эффективное управление сервомоторами является важной задачей.