В МИНОТ в Лаборатории интеллектуальной роботроники под руководством д.т.н. проф. Андреева В.П. завершены работы по созданию многофункционального лабораторного стенда.
Стенд предназначен для проведения практических занятий по изучению сенсорных и управляющих систем роботов со школьниками на занятиях по направлению робототехника, а также со студентами соответствующих специальностей.
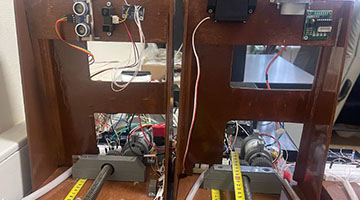
Стенд представляет собой платформу, на которой размещены механические и электронные компоненты. Конструкция стенда позволяет обучающемуся создавать различные варианты их взаимодействия. Стенд даёт возможность изучить на практике использование в системе управления (СУ) роботов таких датчиков, как УЗ- и ИК-датчик расстояния, концевой датчик на герконе и на основе эффекта Холла, датчик тока, оптический одометр и одометр на эффекте Холла (все компоненты входят в состав стенда). В СУ стенда используется микроконтроллер (МК) Arduino, с помощью которого обучающиеся могут создавать различное ПО для управления через имеющийся драйвер шаговым двигателем, сервоприводом и линейным приводом. Линейный привод состоит из двигателя постоянного тока (ДПТ), который посредством зубчатой передачи приводит в движение ходовой винт. Конструкция стенда позволяет автоматизировать процесс снятия характеристик преобразования ИК- и УЗ-датчиков расстояния (калибровка датчиков), предоставляя обучающемуся возможность разработать соответствующее ПО для управления линейным приводом и закрепив на каретке препятствие.